Всем лунатикам привет ! очень интересная тема , и как раз актуальная для меня , так как собираюсь делать лёгкий гусеничник с 2106 мотором +КПП +задний мост , на мосту диски которые крутят гусянку , вобщем поюзал тему про МП решил оставить дифф как есть , так и вес меньше ну и в финансовом плане , но остается проблема постоянного подруливания , ну и случайно попал в эту тему по стабилизации движения , думаю что пневматик на диффе или гусеничник особой разници нет (так проблема одна и та-же) , то решил отписаться здесь по поводу своих состряпанных на скорую руку мыслей .
контроль оборотов колеса электронникой затем корректировка тормозом и т.д. это конечно хорошо , и я чуть было уже не пошел в эту сторону , как все-же решил поискать вариант попроще .
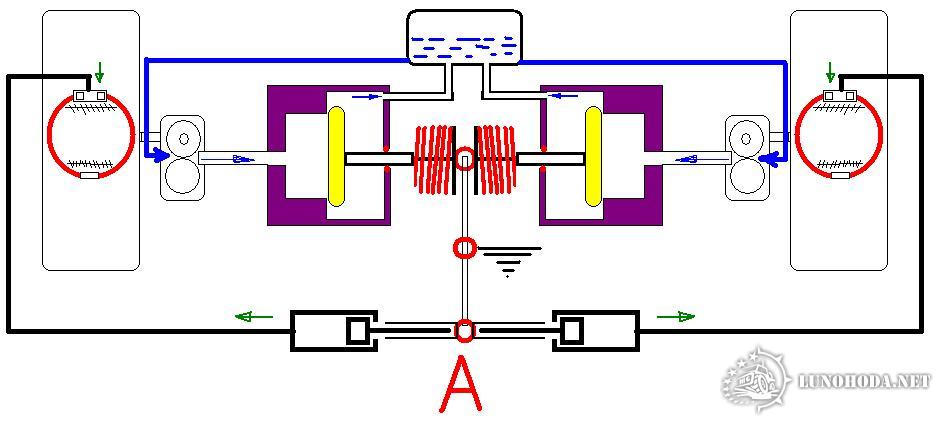
Итак , рассматриваю именно гусеничник , мост тянет гусю и крутит колёса , на одно из колёс с каждой стороны делаем ступицу 2108 с возможностью вывести вал с обратной стороны , на этот вал одеваем маслонасос (2101 и заклиниваем на нём редукционный клапан) этот насос будет давить на редукционный клапан в системе управления , при равных оборотах колес с разных сторон машины давленя на пружины редукционных клапанов будут одинаковыми и каромысло привода тормозных цилиндров будет в нейтральном положении , в зависимости от скорости будет лиш разным сжатие редукционных пружин , как только левое колесо начнёт крутится быстрее правого , то редукционные клапана из-за разности давлений переместятся в право и повернут каромысло привода тормозов начав нажимать при этом на тормоз левого колеса до тех пор пока скорость колес не урегулируется , чем больше разность скоростей тем сильнее давит на тормоз, и наоборот .
если нам надо повернуть , то мы в точке "А" будем перемещать каромысло относительно оси тормозных поршней .
Ну как вам идея ???